Forty years ago today — July 26, 1971 — Apollo-15 lifted off from Cape Canaveral with astronauts David R. Scott, James B. Irwin, and Alfred M. Worden, to become the fourth manned mission to land on the Moon.
The Apollo-15 mission was the first of three upgraded missions designed to maximize the scientific returns from the program. Scott, the commander, and Irwin, the lunar module pilot, landed on the Moon on July 30th in the Lunar Module “Falcon”, and spent several days exploring and collecting samples. Worden, the command module pilot, remained in orbit in the Command and Service Module “Endeavour” and photographed several high-interest lunar formations.
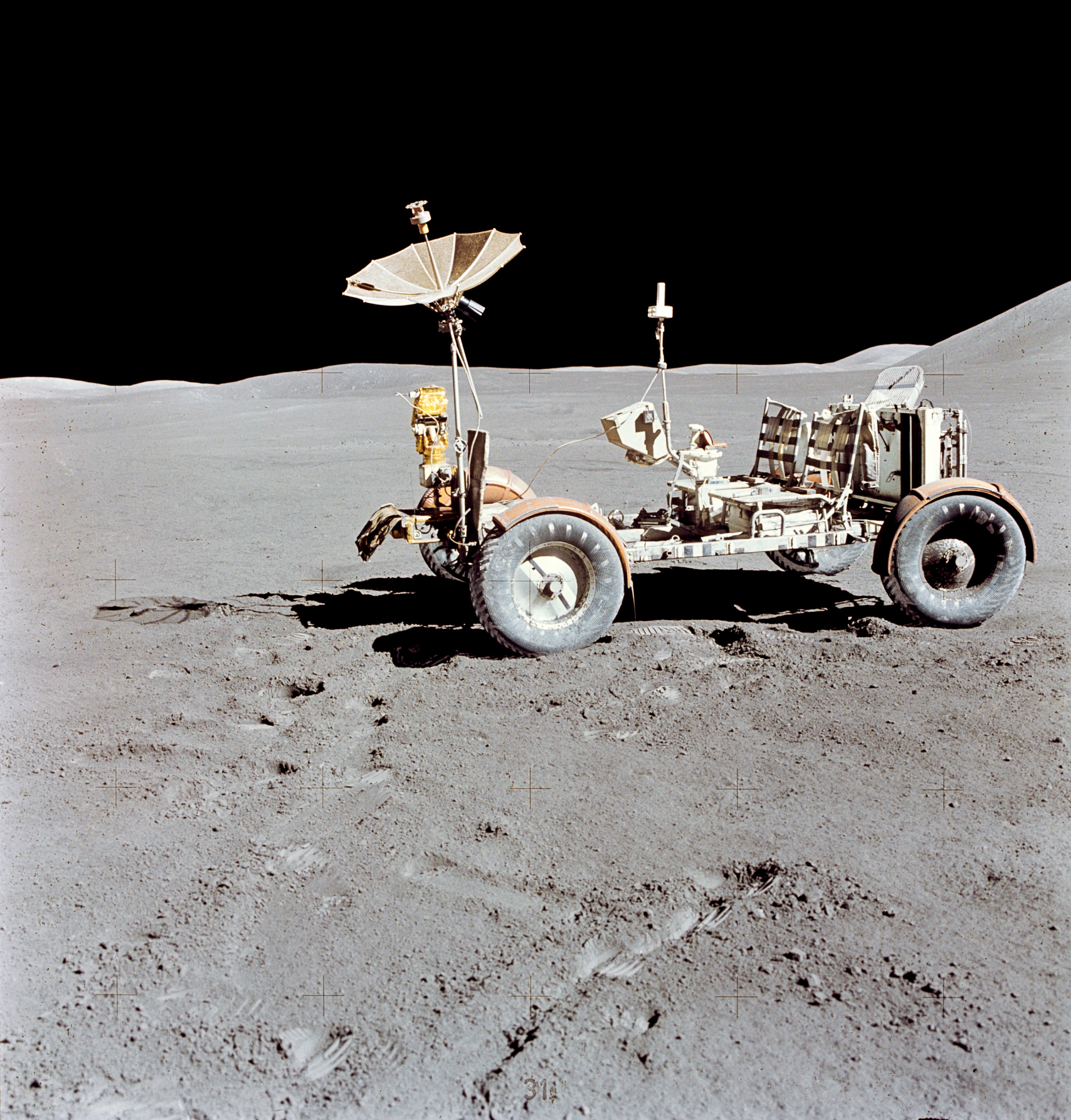
(Lunar Roving Vehicle, first used on Apollo-15. NASA image.)
Apollo-15 was the first mission to feature the Lunar Roving Vehicle. For those interested in the technical details,
The Lunar Roving Vehicle had a mass of 210 kg and was designed to hold a payload of an additional 490 kg on the lunar surface. The frame was 3.1 meters long with a wheelbase of 2.3 meters. The maximum height was 1.14 meters. The frame was made of aluminum alloy 2219 tubing welded assemblies and consisted of a 3 part chassis which was hinged in the center so it could be folded up and hung in the Lunar Module quad 1 bay. It had two side-by-side foldable seats made of tubular aluminum with nylon webbing and aluminum floor panels. An armrest was mounted between the seats, and each seat had adjustable footrests and a velcro seatbelt. A large mesh dish antenna was mounted on a mast on the front center of the rover. The suspension consisted of a double horizontal wishbone with upper and lower torsion bars and a damper unit between the chassis and upper wishbone. Fully loaded the LRV had a ground clearance of 36 cm.
The wheels consisted of a spun aluminum hub and an 81.8 cm diameter, 23 cm wide tire made of zinc coated woven 0.083 cm diameter steel strands attached to the rim and discs of formed aluminum. Titanium chevrons covered 50% of the contact area to provide traction. Inside the tire was a 64.8 cm diameter bump stop frame to protect the hub. Dust guards were mounted above the wheels. Each wheel had its own electric drive, a DC series wound 0.25 hp motor capable of 10,000 rpm, attached to the wheel via an 80:1 harmonic drive, and a mechanical brake unit. Manuevering capability was provided through the use of front and rear steering motors. Each series wound DC steering motor was capable of 0.1 hp. Both sets of wheels would turn in opposite directions, giving a steering radius of 3.1 meters, or could be decoupled so only one set would be used for steering. Power was provided by two 36-volt silver-zinc potassium hydroxide non-rechargeable batteries with a capacity of 121 amp-hr. These were used to power the drive and steering motors and also a 36 volt utility outlet mounted on front of the LRV to power the communications relay unit or the TV camera. Passive thermal controls kept the batteries within an optimal temperature range.
The lunar rover performed well during Apollo-15 and the next two lunar missions, and enabled the astronauts to examine much more terrain than they could have otherwise.
Apollo-15 landed on the eastern edge of Mare Imbrium, at the base of the Apennine range, near the snaking channel known as Hadley Rille:
(Hadley Rille, taken from the Apollo-15 Lunar Module on the last orbit prior to landing. NASA image.)
Of interest to those of us with a literary bent, Hadley Rille was the source of the name for Hadley Rille Books, a small but well-respected publisher of science fiction and fantasy. One of their recent releases is Buffalito Contingency, by my friend Lawrence Schoen (whom I interviewed here and here). Their Footprints anthology is also very good, and proof that their lunar fascination is not just in name only.